

Jak działa autoguiding?
Pierwsze kroki z PHD Guiding
Push Here, Dummy: pierwsze kroki w korzystaniu z oprogramowania do autoguidingu na przykładzie programu PHD Guiding.
 Pewnie ku długim ekspozycjom: teleskop z wyposażeniem do autoguidingu w akcji. Mario Weigand
Pewnie ku długim ekspozycjom: teleskop z wyposażeniem do autoguidingu w akcji. Mario Weigand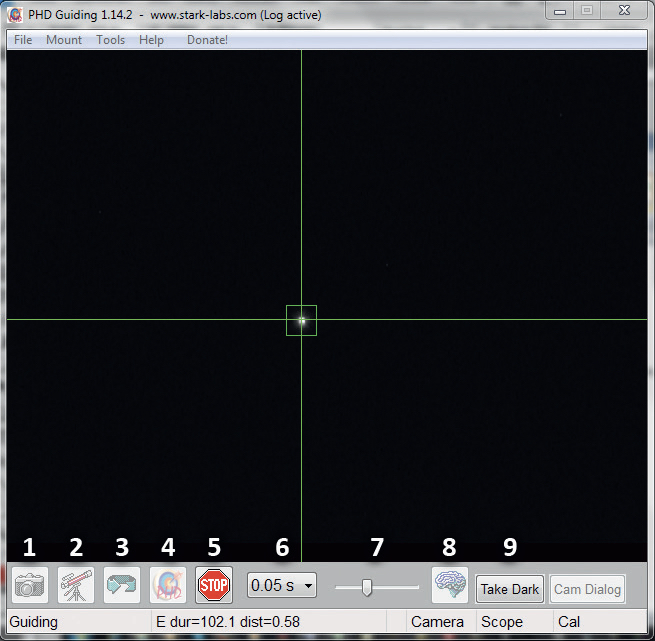 Okno główne PHD z ważnymi funkcjami. Mario Weigand
Okno główne PHD z ważnymi funkcjami. Mario WeigandTen artykuł obejmuje pierwsze kroki w korzystaniu z oprogramowania do autoguidingu. Program PHD Guiding (Push Here, Dummy) oferuje w tym zakresie darmowe rozwiązanie. Deklaruje niezwykłą prostotę użytkowania. Obsługuje praktycznie każdą renomowaną kamerę śledzącą.
Program jest przejrzyście zaprojektowany i dzięki temu umożliwia łatwe wdrożenie w tę tematykę. Po uruchomieniu pojawia się okno: standardowe menu zapewnia dostęp do podstawowych ustawień. Poniżej znajduje się aktualny obraz z kamery i pasek sterowania najważniejszymi funkcjami. Na dole okna programu jest pasek stanu, pokazujący ważne komunikaty.
Ustawienia wstępne
Przed pierwszym użyciem należy skonfigurować niezbędne połączenia z autoguiderem i montażem. Ważne jest, czy komputer lub autoguider komunikują się z montażem poprzez złącze ST-4. W tym drugim przypadku należy wybrać w menu "Mount" opcję "OnCamera". W przypadku zastosowania montażu bez interfejsu ST-4, a jedynie z interfejsem szeregowym (RS-232), serowanie odbywa się za pomocą sterownika ASCOM.
1. Nawiązanie połączenia
Za pomocą przycisków 1 i 2 ustanawiane są w tej kolejności połączenia z kamerą śledzącą lub montażem. W przypadku połączenia ASCOM otwiera się odpowiednie okno dialogowe.
2. Przygotowanie autoguidera
Po nawiązaniu połączenia, pierwszym krokiem do przygotowania systemu jest ustawienie ostrości autoguidera. W tym celu przydatne może być wydłużenie czasu ekspozycji do pięciu sekund tak, aby widoczne stały się nawet silnie rozogniskowane nieostre gwiazdy. Następnie, w trybie pętli (przycisk 3), należy stopniowo zbliżać się do punktu ostrości. Przy oznakowaniu pozycji ostrości na wyciągu okularowym, można ten proces przyspieszyć w kolejnych cyklach.
Do śledzenia użyteczne są czasy ekspozycji rzędu jednej sekundy. Odpowiednia gwiazda prowadząca nie powinna być zbyt słaba, ale nie powinna być też prześwietlona. Wyboru dokonuje się manualnie, po prostu kilkając w wybraną gwiazdę. Na pasku stanu wyświetlana jest wartość S/N, która pomaga ocenić gwiazdę prowadzącą. Wartość ta wskazuje, jak dobrze gwiazda wyróżnia się z szumu tła. Zalecane są wartości 4,0 i wyższe. Jeśli nie ma do dyspozycji odpowiedniej gwiazdy prowadzącej, pole widzenia można przestawić za pomocą obejm, mimośrodu lub guidera off-axis.
Po znalezieniu odpowiedniego ustawienia, należy wykonać ciemną klatkę z zasłoniętym obiektywem optyki śledzącej (przycisk 9), aby skorygować hotpiksele. Ciemna klatka jest następnie automatycznie odejmowana od każdej kolejnej klatki. W przypadku zmiany czasu naświetlania, należy wykonać nową ciemną klatkę. Jeśli podczas rejestracji pójdzie coś nie tak, wadliwą ciemną klatkę można usunąć za pomocą menu "Tools/Erase Dark".
3. Kalibracja
Zanim ruszy korekcja śledzenia, autoguider musi zostać skalibrowany. Oznacza to, że PHD Guiding musi się nauczyć, jak i jak mocno montaż reaguje na polecenia sterownika. Jeśli tryb pętli jest wciąż aktywny, zostaje on teraz zakończony. Po ponownym kliknięciu przycisku 4 PHD Guiding rozpoczyna kalibrację. Sygnały sterownika podawane są kolejno w obu osiach i można obserwować, jak gwiazda prowadząca powoli się przesuwa.
Kalibrację można zoptymalizować pod kątem wykorzystanej ogniskowej do prowadzenia za pomocą parametru "Calibration step" w ustawieniach (przycisk 8). Przykładowo, w przypadku 500mm sprawdza się 1000ms, dla długich ogniskowych rzędu 2000mm wskazane są krótsze kroki kalibracji, wynoszące 250ms.
Jeśli kalibracja przebiegła pomyślnie, program natychmiast przechodzi do śledzenia. Na pasku stanu pojawia się wtedy komunikat "Guiding", a gwiazda oznaczona jest na zielono.
4. Proces autoguidingu i regulacja precyzyjna
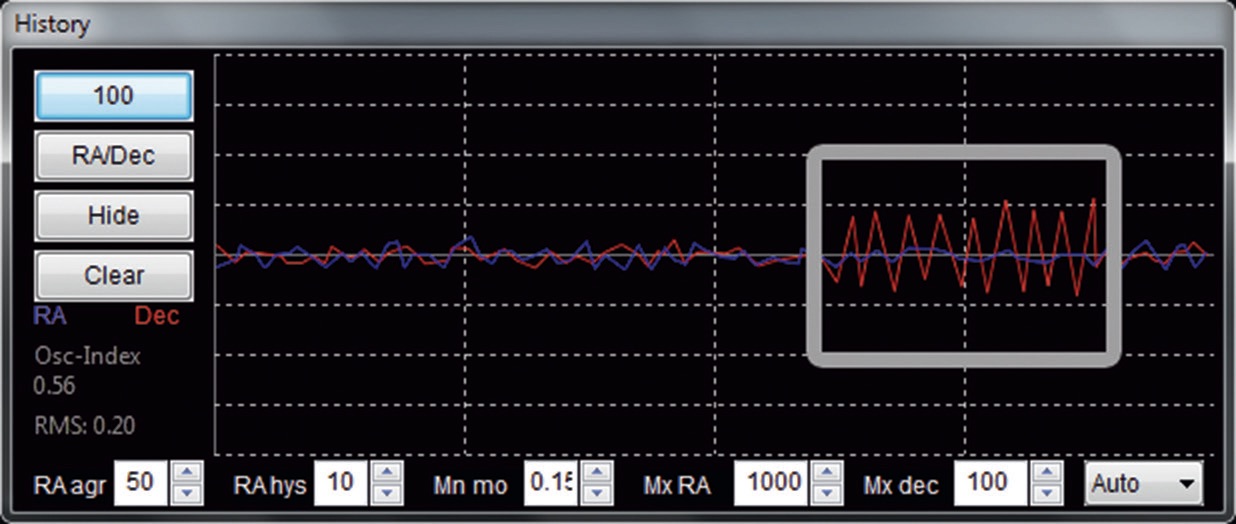 Wykres błędów przy stabilnym śledzeniu. Fragment po prawej stronie pokazuje oscylację w deklinacji spowodowaną zbyt wysoko ustawioną agresywnością. Mario Weigand
Wykres błędów przy stabilnym śledzeniu. Fragment po prawej stronie pokazuje oscylację w deklinacji spowodowaną zbyt wysoko ustawioną agresywnością. Mario WeigandPracę śledzenia można skontrolować za pomocą wykresów błędów dostępnych w menu "Tools/Enable Graph". Wykres niebieski i czerwony przedstawiają odchylenia w rektascensji i deklinacji.
Możliwe problemy:
Program może gubić słabe gwiazdy prowadzące. Można to rozpoznać po żółtym oznaczeniu gwiazdy. Pomóc tu może jedynie jaśniejsza gwiazda prowadząca, dłuższy czas naświetlania lub parametr "Noise reduction" (patrz niżej).
Jeśli korekcja śledzenia nie działa prawidłowo, gwiazda z upływem czasu oddala się od pozycji wyjściowej. PHD Guiding sygnalizuje to czerwonym komunikatem ostrzegawczym.
Częstą przyczyną jest niewłaściwe połączenie kablowe z montażem lub zbyt duży luz na przekładniach.
Ponadto, istnieje kilka ważnych parametrów, dostępnych pod przyciskiem 8, które wpływają na jakość korekcji śledzenia. Należy zaznaczyć, że nie ma uniwersalnie prawidłowych parametrów. Optymalne ustawienia muszą być dobrane indywidualnie do danego teleskopu. Pomóc mogą tu następujące wskazówki:
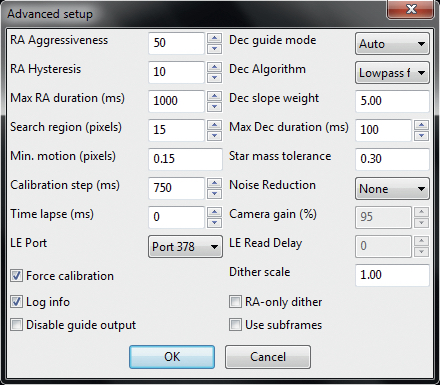 Okno ustawień zaawansowanych. Mario Weigand
Okno ustawień zaawansowanych. Mario WeigandAgresywność RA:
Agresywność jest miarą tego, jak silnie program powinien reagować na błąd śledzenia. W celu optymalizacji należy obserwować wykres błędów. Jeśli agresywność ustawiona jest zbyt nisko, guider zbyt wolno reaguje na ponowne wyśrodkowanie gwiazdy prowadzącej po błędzie śledzenia. Należy wówczas zwiększać tę wartość w krokach co dziesięć. Z kolei jeśli wartość jest ustawiona zbyt wysoko, można zauważyć nadsterowność – w rezultacie gwiazda "kołysze się" wokół pozycji wyjściowej (por. wykres błędów z punktu 4). Należy tu jednak uwzględnić opisaną poniżej współzależność z histerezą!
Histereza RA:
Histereza to próg reakcji. Można tu zmienić najmniejszą wartość błędu, od której ma nastąpić korekta. Jeśli próg jest zbyt niski, system guidingu reaguje na wahania spowodowane seeingiem, co może prowadzić do nadsterowności, podobnie jak w przypadku agresywności. Wartość tę optymalizuje się również w krokach co dziesięć.
Redukcja szumów:
W przypadku słabych gwiazd prowadzących można sobie pomóc funkcją pixel-binning. Można połączyć piksele 2×2 lub 3×3, by poprawić wartość S/N. Jednocześnie jednak obniża się rozdzielczość. W przypadku optyki o bardzo krótkiej ogniskowej łączenie pikseli może natomiast pogorszyć jakość korekcji śledzenia. Ważne: po zmianie tego ustawienia należy wykonać nową ciemną klatkę! W przypadku pozostałych parametrów, ustawień wstępnych zasadniczo się nie zmienia. Teraz nic już nie stoi na przeszkodzie, by wykonywać prawidłowo guidowane astrofotografie z długimi czasami naświetlania!
Autor: Mario Weigand / Licencja: Oculum-Verlag GmbH